







Process Solution
PART VERIFICATION SYSTEM
TECNICAL HIGHLIGHTS:
- Fully automated integration
- 100% in-line inspection
- Optical resolution 0.1mm
- Cycle time 16-24s
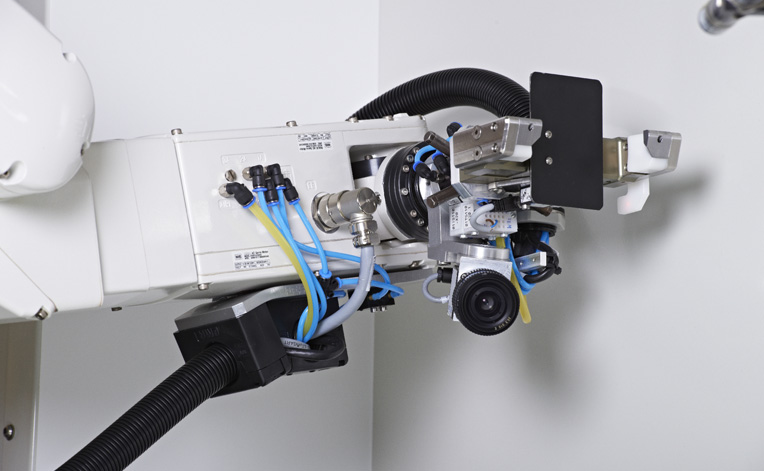
- Two CCD camera systems
- Laser scanner profile measurement
- Fast and precise robot handling
- Flexible gripping position adaption
- Feasible for medical products and cleanroom environment
- Adaptable for a wide product range
- Minimal user interaction
- Intuitive HMI design
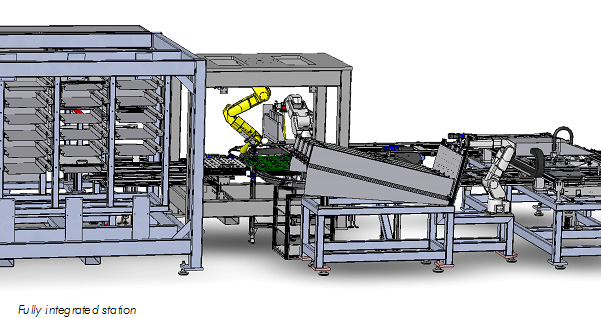
The IMSTec Part Verification System provides fully automated verification of many different sample types in parallel such as orthopaedic implants. A robot gripper ensures highly flexible and precise handling of the products. The geometry of every part is measured and compared to the specification. An included gripper station provides adapted robot grippers for all products.
DESCRIPTION:
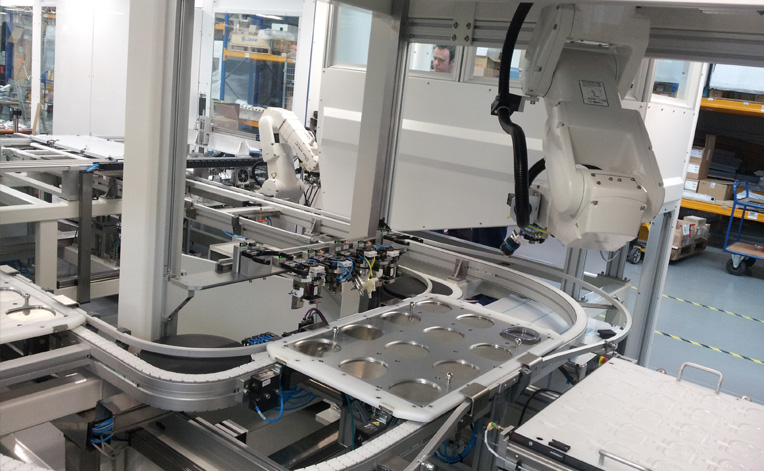
One main component of IMSTec’s fully automated packaging system is the part verification system. Before the medical implants are packed into skin foil their product type is determined and the geometry is verified by a generic image processing algorithm. Shape, size and position of the part are forwarded to the robot controller in order to choose the right gripper and to have a precise position for gripping the part. Further image processing verifies the coating surface on the part.
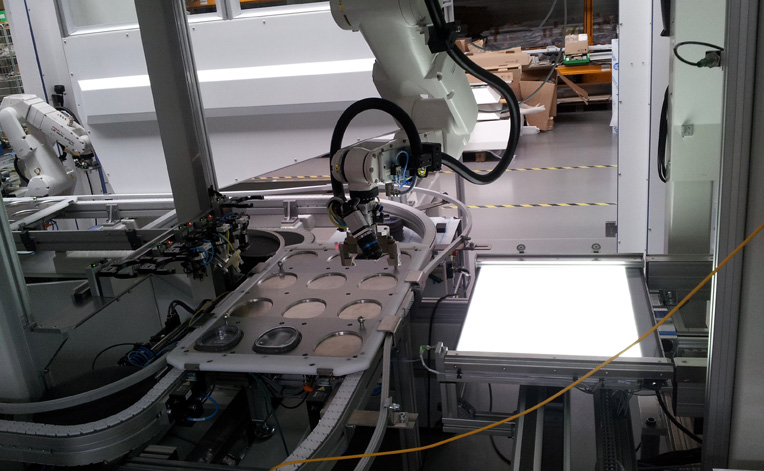
Good parts go to the packaging process, defect parts are separated. The part verification system ensures that the selected packaging recipe fits to the loaded part. Up to 20 different parts can be loaded so every part needs to be inspected. Initially all parts are sorted on a logistic tray that consists of a semi-transparent diffusor plate. For the first verification step the parts are inspected by the head mounted robot camera with backlight in order to determine the product family and measure the width and height of the part. Now the robot selects the according gripper from a gripper station, picks the part and moves it to the second inspection station.
Different products require different view for each feature to be inspected. According to the recipe the robot moves the part to the product-related inspection positions. This inspection step also includes a surface coating verification and a laser scanner measurement of some part geometries. All measured data are checked against the expected specifications. Parts that do not match to the specification are classified as “bad” and thus ejected. All other parts are loaded to the next process step which is the skin packaging.
The part verification system does not include a safety housing by default as it is included into an automated line. A stand-alone system would be delivered with a safety housing. The camera system used for the second inspection step is encased in order to prevent unintended reflections and light incidence.